

 联系我们
联系我们

主营ABB、库卡KUKA、安川YASKAWA、发那科FANUC、欧地希OTC、川崎Kawasaki、遨博AUBO、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生EPSON等进口机器人项目集成、机器人代理、机器人配件、机器人售后维保、机器人培训一站式服务。
地址:上海市嘉定区南翔镇众仁路399号B座20楼(19921272665)
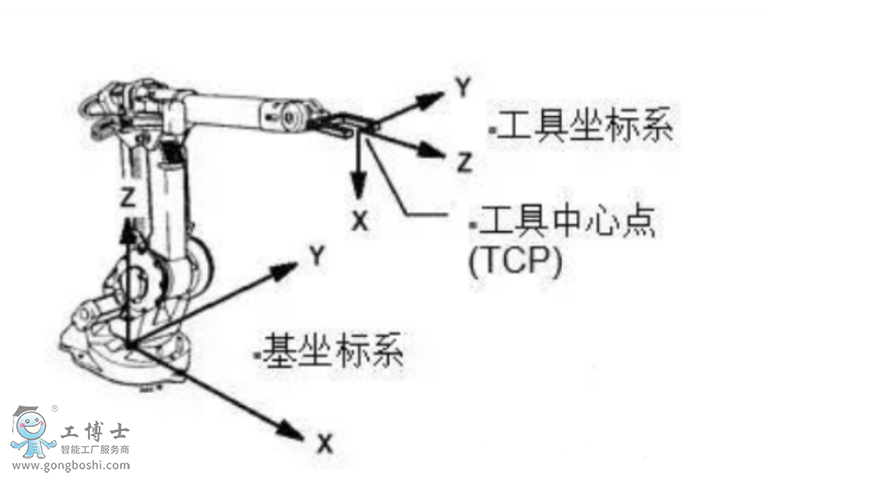
TCP指的是工具中心点(Tool Center Point,TCP)。
工业现场的机器人实际上是有多个轴的机械手臂。要想让机器人完成指定的生产任务,通常需要在机器人的末端固定一个工具,比如焊接机器人的焊枪、涂胶机器人的胶枪、搬运机器人的夹具等。由于各工具的大小、形状各不相同,这样就产生一个问题:如何选择一个点来代表整个工具呢?这就是本文要讨论的话题:机器人的工具中心点。
“工具中心点”的英文名称为“Tool Central Point”,简写为“TCP”。初始状态的工具中心点(TCP)是工具坐标系(Tool Coordinate System)的原点。当我们以手动(Jogging)或者编程(Programming)的方式让机器人去接近空间的某一点时,其本质是让工具中心点去接近该点。因此可以说机器人的轨迹运动,就是工具中心点(TCP)的运动。
同一个机器人可以因为挂载不同的工具,而有不同的工具中心点;但是同一时刻,机器人只能处理一个工具中心点。比如,使用不同尺寸的焊枪,其枪口的位置肯定是不同的;但我们一次只能用一把焊枪,不能同时用两个。
为完成各种作业任务,需要在工业机器人末端安装各种不同的工具,如喷枪、抓手、焊枪等。由于工具的形状、大小各不相同,在更换或者调整工具之后,机器人的实际工作点相对于机器人末端的位置会发生变化。
目前普遍采用的方法是在库卡机器人工具上建立一个工具坐标系,其原点即为工具中心点(Tool Center Point,TCP)。
库卡机器人在此坐标系内进行编程,当工具调整后,只需重新标定工作坐标系的位姿,即可使机器人重新投入使用。
工具中心点(TCP)有两种基本类型:移动式工具中心点(Moving TCP)和静态工具中心点(Stationary TCP)。
移动式工具中心点(Moving TCP)比较常见,它的特点是会随着机器人手臂的运动而运动。比如焊接机器人的焊枪、搬运机器人的夹具等。
静态工具中心点(Stationary TCP)是以机器人本体以外的某个点作为中心点,机器人携带工件围绕该点做轨迹运动。比如在某些涂胶工艺中,胶枪喷嘴是固定的,机器人抓取玻璃围绕胶枪喷嘴做轨迹运动,该胶枪喷嘴就是静态工具中心点。
机器人调试时首先要设置工具数据(Tool Data),其内容包括设置工具中心点(TCP)、工具的重量和重心。ABB机器人在出厂时有一个默认的工具数据(tool0),tool0定义的TCP在机器人第六轴法兰盘的中心处(以六轴机器人为例)。在实际生产时要根据安装工具的不同,定义不同工具数据。比如下面这张图就有五个不同的工具数据(Tool Data)。
TCP 的类型
1、常规 TCP
无论是何种的工业机器人,事先都定义了一个工具坐标系,无一例外地将这个坐标系XY平面绑定在机器人第六轴的法兰盘平面上,坐标原点与法兰盘中心重合。
显然,这时TCP就在法兰盘中心。不同的机器人有不同的称呼,ABB机器人把这个工具坐标系称为tool0,REIS机器人称之为 _tnull。
2、固定 TCP
前面介绍的TCP是跟随机器人本体一起运动,但是也可以将TCP定义为机器人本体以外静止的某个位置。常应用在涂胶上,胶罐喷嘴静止不动,机器人抓取工件移动。其本质是一个工件坐标系。
3、动态 TCP
前面介绍的TCP是相对于机器人本体法兰盘坐标系,或者大地坐标系,但随着更复杂的应用,TCP可以延伸到机器人本体轴外部,应用在TCP需要相对法兰盘做动态变化的场合。这种可称之为动态工具( Dynamic Tool),其TCP可称之为动态TCP 。
注:本文章文字、图片部分来自网络
版权归原作者,侵删。
工博士可以提供了ABB,库卡,安川,发那科和欧地希等各种机器人和常用机器人型号,并且包括机器人的配件,保养,维修,培训等等服务我们都可以进行服务,真正做到了为客户进行一站式的服务保障,并且工博士现已经是集九大机器人代理于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。
库卡机器人产品资料,技术选型,操作编程,技术调试,售后培训
更多咨询:库卡机器人


- 下一篇:库卡机器人维护-库卡机器人
- 上一篇:工业机器人四轴与六轴的区别